
The industry partners supporting Memphis students through Herff's Senior Design Expo

For nine months, seniors at the Herff College of Engineering work hand-in-hand with industry leaders in and around Memphis to solve a real-world problem facing each respective company. The Herff College of Engineering expresses its sincere gratitude to these companies for financially supporting our students' projects and providing invaluable experience to our graduating seniors. Those industry partners are Jeraid Redmond, Shane Riding, Ahmad Alsaffar, Brian Butler and Jacob Loschinskey of Medtronic; Jared Moses and all of Baptist Memorial Hospital-Memphis; Dr. Joe Greer of the Good Health Institute; the Memphis Zoo; ABB in conjunction with Precision Painters; the American Institute of Aeronautics and Astronautics (AIAA); Tiger BAJA; Stephen Doorley of RAPAC; Matt Davis of ABB; Jackie Carter of PEMKO/ASSA ABLOY; National Guard Products; and Rud Hunsley of Rough Country.
Here's how each company supported Herff students in 2026.
Baptist Memorial Hospital
Baptist Memorial Hospital supported three Herff 2026 Senior Design projects, including the project of Team HMAACK who won the 2026 expo with their temperature-controlled storage facility. Jared Moses of Baptist Memorial Hospital-Memphis sponsored one team in particular, the Baptist Hospital Improvement Project.

(Team HMAACK presents their design)
Team HMAACK
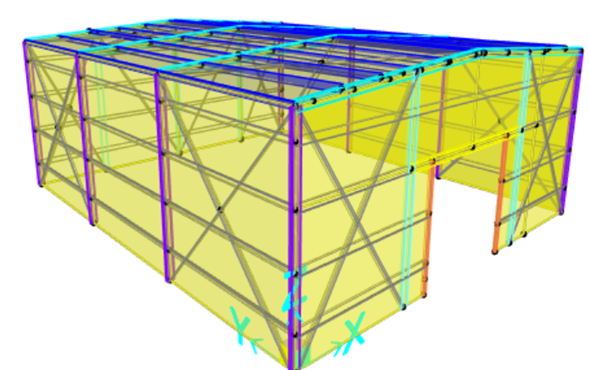
This project includes the consultation and design of a ground-up addition of a 3,000 square foot temperature-controlled storage building within the employee parking lot at Baptist Memorial Hospital East. The design scope of this project involves demolition planning, utility rerouting, structural and foundation design, site planning, grading and drainage improvements, erosion control planning and phasing, traffic control and parking adjustments, paving design, and interior layout. In addition to efficient storage, design will also include 2 bathrooms, a utility sink, an office, a corridor, and a forklift charging facility within the building.
Figure: 3-dimensional rendering of building frame design, featuring a gable frame system composed of rolled wide-flange steel members.

Mallory Martin, Ariadna Mendoza Charlotte Rector, Kayla Simmons, Holly Hoffman, and Averie Irons; Civil Engineering
Team Tigers, Inc.
Baptist Memorial Hospital is running out of space to store items such as disaster equipment, older patient beds, and other operational supplies. Existing storage areas are being repurposed to support an expanded Emergency Department, creating the need for additional storage while minimizing impacts to campus activities. This project delivers the final design for a structurally-sound, temperature-controlled storage facility in the hospital’s employee parking lot, along with the parking and circulation improvements needed to maintain safe and efficient access. The project objectives include providing at least 3,000 square feet of storage space, and approximately 500 square feet of office space. Key constraints include maintaining uninterrupted hospital operations, preserving emergency and service access routes, minimizing loss of existing parking, and protecting nearby environmental resources such as the Wolf River.
The design approach includes evaluating cost-effective site layout alternatives, developing a building floor plan that provides adequate storage for the facility, and completing the civil and structural engineering design for the selected solution. Civil design elements address utility coordination, site grading, and a stormwater management plan, along with pavement and striping modifications to improve parking lot circulation. Structural design elements establish the building’s primary framing system and foundation to meet strength, serviceability, and constructability requirements. Expected deliverables include a complete set of 100% construction drawings and a final presentation summarizing the design.
Abedrahman Imam, Civil Engineering, David Bonds, Civil Engineering, Deonius Hines,
Civil Engineering, Justin Burns, Civil Engineering, Kyle Magtira, Civil Engineering,
Michael Palmer, Civil Engineering, Mohamad Abdoulkarim, Civil Engineering
Oscar Parra Jr., Civil Engineering
Baptist Hospital Improvement Project
Reducing expired medical supplies on the 2 West unit at Baptist Hospital was the primary goal of this project. Inefficient inventory management practices, limited supply visibility, and inconsistent restocking procedures contributed to supplies expiring before use. The unit also lacked a clearly defined process for managing empty supply bins, which created uncertainty around replenishment responsibilities. As a result, nurses frequently traveled to the Central Supply Room (CSR) to retrieve supplies that were unavailable on the unit. These reactive supply requests generated a high number of CSR checkout transactions and indicated poor inventory control within the 2 West supply room.
CSR checkout transactions were used as the measurable performance indicator because frequent supply retrieval from the CSR reflected inefficiencies in unit-level inventory management and contributed to supply waste. A current-state assessment was conducted to evaluate workflow gaps, storage layout, space utilization, and replenishment behavior within the 2 West supply room. Lean workplace organization principles were applied to redesign the supply layout and improve visibility and accessibility of inventory. A two-bin replenishment system was introduced to establish a structured method for maintaining supply levels and improving product rotation.
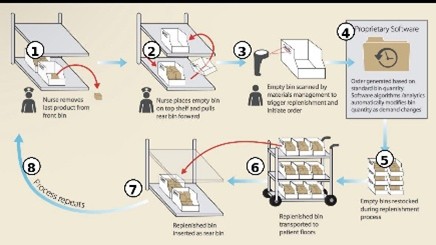
The redesigned process includes an empty-bin scanning procedure that automatically triggers a replenishment request when the first bin becomes empty. Central Supply Room staff then restock the supply and deliver it directly to the unit, creating a continuous pull-based inventory cycle. Key deliverables include a future-state layout, a standardized replenishment workflow, measurable performance metrics, and a sustainability framework to maintain the system. By improving supply management on the highest-impact unit, the project reduces expired inventory, decreases unnecessary CSR visits, and establishes a scalable improvement model that can be applied across additional hospital units.
Figure: Two-bin replenishment process showing nurse-triggered empty bin scan, automated order generation, CSR restocking, floor delivery, and continuous pull-based inventory control cycle.
Kaleb Peterson, Engineering Technology, Shwki Altwalah, Engineering Technology, Mario Arrendondo, Engineering Technology, Nathan Cotton, Engineering Technology
MEDTRONIC
Medtronic sponsored four teams at the Herff Senior Design Expo. Product Devlopment Engineer Brian butler and Senior R&D Engineering Jacob Loschinskey sposored teams The Lords of Lumbar and CerviStop. Ahmad Alsaffar of Medtronic sponsored Team Rongeur and Jerald Redmond and Shane Riding of Medtronic sponsored Team Shear Genuis.

(Team Lords of Lumbar presnets their design)
Team The Lords of Lumbar
Cervical radiculopathy and myelopathy are conditions that occur in the spine that are usually caused by a herniated disc. The condition can cause immense pain and weakness in the patient. The Anterior Cervical Discectomy and Fusion (ACDF) surgery was implemented to solve this problem. The surgery involves making an incision near the throat and removing the damaged intervertebral disc and replacing it with a cage. This cage acts as a bridge between the two vertebrae and promotes fusion. Success of the surgery depends heavily upon expert level surgical techniques due to the proximity of the spinal cord. This also means that the tools and devices the surgeons would be using need to be reliable.
During the surgery, the surgeons use devices called Trials and Inserters that measure cage size as well as implanting desired cage size. Maintaining precision of the inserter depth is critical as any slight misstep could result in serious neurological injury. While surgeons are known to rely on experience and feel during surgery due to reduced visibility from the depth stop, a mechanical depth stop could be added to enhance patient safety.
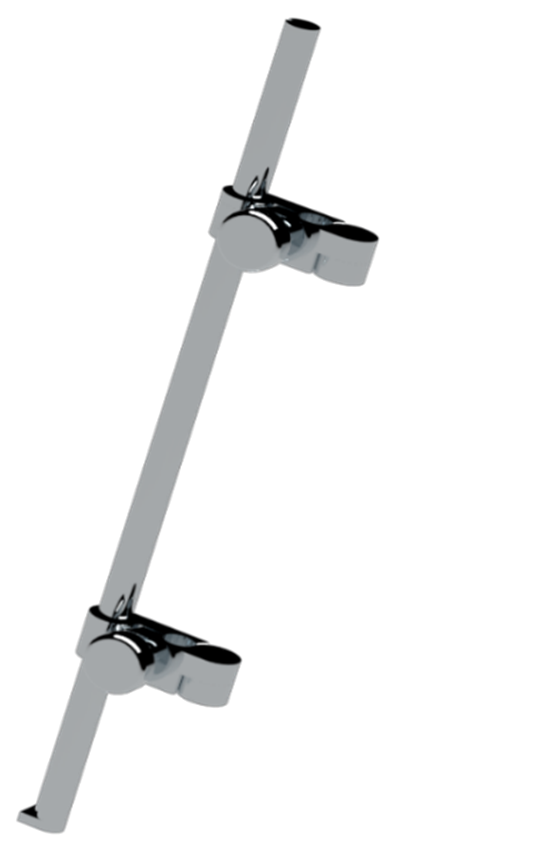
The depth stop being proposed is designed to limit insertion depth while preserving visibility and control of the surgeon. The increasing number of ACDF surgeries highlights the need for innovation in instruments in the surgical field. Even small ideas or tweaks towards existing devices can have a profound impact on someone having a successful surgery. This project puts an emphasis on visibility and simplicity, so the proposed concept seeks to enhance the existing ACDF equipment rather than replace them. Ultimately, the purpose of the project is to enhance patient safety and improve usability of the already used devices like the inserter and cervical trials.
Figure 1: Render of the propsosed depth stop, two clamps and a rod that has an adjustable height actuated by a thumbnut.

Michael Dumas, Bachelor of Science in Mechanical Engineering and in Physics, Michael Moore, Bachelor of Science in Mechanical Engineering, Aubrey Durham, Bachelor of Science in Mechanical Engineering
Team CerviStop
Anterior cervical discectomy and fusion is a common spinal procedure in which an interbody cage is inserted into the cervical spine to restore disc height and promote fusion. During implantation, surgeons rely primarily on visual and tactile feedback to control insertion depth. Over-insertion of the implant can result in serious complications, including posterior cortical breach, neural irritation, and potential spinal cord damage. Current cervical depth stop instruments are typically permanently integrated into the inserter and do not provide an optional, adjustable mechanism that allows surgeons to use depth limitation at their discretion.
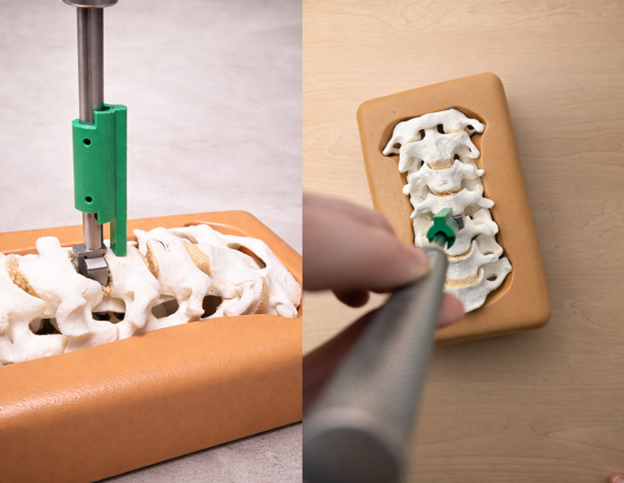
This senior design project addresses the need for a method that enables orthopedic surgeons and neurosurgeons to selectively apply depth control while maintaining safe insertion limitations during cervical procedures. The proposed solution is an optional adjustable depth stop collar attachment designed for compatibility with existing cervical cage inserters. The device consists of a small circular tube with a bottom cutout that mounts onto the inserter shaft and is secured using two screws. A rigid bar attached to the top of the collar extends forward and contacts the anterior cervical vertebra during insertion, physically preventing over-advancement of the implant.
The design process incorporated objectives trees, functional decomposition, morphological analysis, and structured concept selection to evaluate alternative mechanisms. Engineering requirements were defined for dimensional tolerances, resistance to mallet impaction forces, fatigue strength, sterilization compatibility, corrosion resistance, and repeatable accuracy. Verification testing included dimensional inspection, impaction force evaluation, and mechanical stability assessments. A formal failure mode and effects analysis was conducted to evaluate hazards related to device use, mechanical integrity, aging, and sterilization.
The final design provides a removable and reliable method to enhance surgeon control and improve safety and precision during cervical fusion surgery.
Figure 1. Adjustable depth stop collar prototype mounted on cervical trial to physically limit implant insertion depth.

Tiffany Kent, Biomedical Engineering, Sohyla Mesalem, Biomedical Engineering, Keilan Roseheart, Biomedical Engineering
Team Rongeur
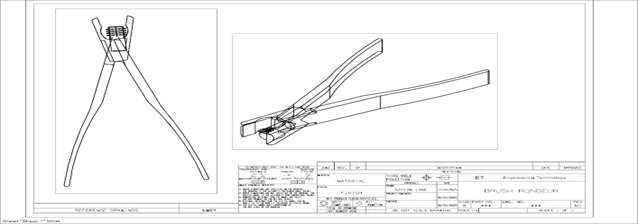
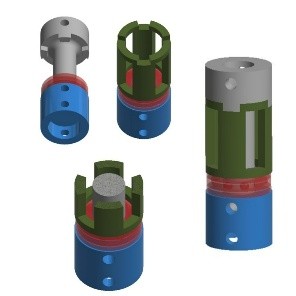
A rongeur is a surgical instrument used to cut bone and tissue during surgical procedures. They require removal from the surgical site after each use for cleaning. This removal poses risks, including misplacement of the surgical site upon reentry, infection from improperly sterilized cleaning materials, and harm to surgeons and/or patients. This has led to a need for a self-cleaning rongeur or a better cleaning method. The self-cleaning rongeur in this design is a surgical instrument designed to enable a safe and effective procedure without the constant removal of the rongeur at the surgical site, or to at least provide a better means of cleaning. To design a self-cleaning rongeur that reduces the number of times it is removed from the surgical site, or to develop a better cleaning method, we introduced three potential design possibilities for a self-cleaning rongeur. These designs consist of an external suction and fluid-flush device, a rongeur with detachable, replaceable jaws, and a rongeur with a brush. After reviewing the pros and cons of each design, the team decided to proceed with the flush and suction device as our final design. The flush and suction rongeur will be hung over the surgical site, and clean inserted rongeurs will be operated by the surgeon using a pedal. The problem at hand is being able to fit the suction tube on the rongeur without causing blockage of the working site. As a team, we are continuing to build a prototype to test possible solutions for the design we chose.
Figure 1: Drawing of one of the considered designs that uses a rotating brush to clean jaws.

Shemar Moore, Biomedical Engineering, Yamekia Fair, Biomedical Engineering, Stefan Lane, Biomedical Engineering, Kalyn Ball, Biomedical Engineering
Team Shear Genius
During surgeries on the cervical spine and pelvis region, rods are used to aid in realignment of the spine to help correct scoliosis, a condition involving curvature in the spine, or to perform interbody cage expansion to repair issues with disc height during herniation. Placing pedicle screws to secure these rods involves creating a pilot hole through the bone at the fixation point and inserting these screws to anchor the spinal rods. Currently, tactile feedback is used to determine the appropriate amount of force which has implications for instability at the screw site from excessive force. This instability can affect bone alignment along the spinal column. Additional data is needed on how much force can be safely applied to a patient during screw driving, based upon their relative bone density. A prototype involving a wireless device that pairs with Medtronic screw driving equipment and gives live feedback via a Bluetooth connected app currently exists to address this need. Areas for improvement include the indication of bending moment to prevent screws from bowing out of the pilot hole, while also reducing signal noise during combined loading. The project team aims to address these concerns with an updated prototype that can both meet these metrics and expand upon pre-existing feedback architectures.
The proposed solution is an updated load cell model that mitigates signal crossing of detected force during combined loading. Strategic placement of strain gauges improves sensing of deflection through the load cell from axial force, torque, and bending moments. Bending is to be indicated with a user-interface displaying a crosshair to track screw trajectory that alerts if out of bounds. Advantages of this design are more accurate data collection, clearer communication to users, and improved safety for patients.
Wyatt Walorinta, Mechanical Engineering, Caleb Taylor, Mechanical Engineering, Sophie Nieder, Mechanical Engineering, Elaina Moore, Mechanical Engineering
Dr. Yue Guan, Department of Mechanical Engineering
Memphis Zoo
The Memphis Zoo supported three teams in the Herff 2026 Senior Design Expo.

(Team Catapultures presents their design)
Team Catapultures
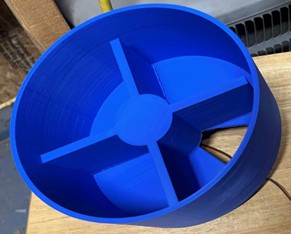
This senior project addresses a need identified by the Memphis Zoo to improve efficiency while also improving the behaviors and mental welfare for their animals. Zookeepers are responsible for managing numerous enclosures across large areas and distributing treats at varied intervals to promote natural foraging, which can be time intensive. Additionally, insufficient stimulation may contribute to undesirable behaviors. The project objective is to design a semi-automated, self-reloading catapult that can deliver food and treats at random distances and times within specified enclosures. The system is required to launch treats up to specific distances, depending on which enclosure it is assigned to, with a maximum launch of approximately 140 feet for the Grizzlies, and to launch up to eight rounds per loading cycle, with the integrated automatic feeder supplying treats in random intervals, such as one at 30 minutes, another an hour later, another in 20 minutes, and so on, for up to 8 hours to support a full shift. Key design constraints include operator, guest, and animal safety; environmental durability and water resistance; mechanical reliability; and natural visual integration into the environment. The design will incorporate a launch mechanism via strong elastic bands, control over distances and intervals using a side panel, and an automatic loading device. A randomized algorithm regulates launch timing and distance to help with natural food dispersion patterns for the animals. Deliverables for this project are to have a functioning scale prototype incorporating core mechanical and control elements, a fully operational automatic feeder, documented testing results, schematics and manufacturing prints, embedded control code, and comprehensive operating documentation. The expected outcome is a durable and enriching catapult that reduces labor demands on staff while encouraging animals to explore and forage. This will help to improve operational efficiency, animal welfare through stimulation of natural behaviors, and demonstration of applied engineering technology in a real-world zoological setting.
Figure: The autoloader. The final design will hold 8 payloads of treats and food.
Jonas Thomas, Engineering Technology, Matthew Louks, Engineering Technology, Angel Vieyra, Engineering Technology, Meilin Melson, Engineering Technology, Ryan Gore, Engineering Technology
Team Zoo Crew
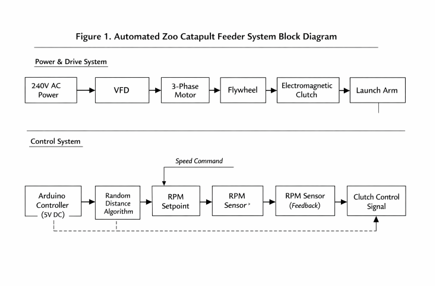
Zoological facilities require safe, efficient, and enriching feeding methods for the animals that reduce manual labor while maintaining controlled food distribution. Current feeding approaches are often labor-intensive, limited in range variability, and dependent on direct human operation. This project addresses the need for an automated system capable of delivering feed to programmable and randomized distances in a controlled, repeatable, and safe manner. The objective is to design and develop a fully automated electromechanical catapult system that launches feed portions to calculated distances without manual control. Key constraints include mechanical safety, launch consistency, controlled projectile range, structural durability under cyclic loading, electrical reliability, and cost effectiveness. The design integrates mechanical energy storage with closed-loop electronic control. A flywheel-driven launch mechanism powered by a three-phase induction motor is regulated by a Variable Frequency Drive (VFD) for precise speed control. An Arduino-based controller calculates a randomized target distance, determines the required rotational speed in revolutions per minute (RPM), monitors real-time feedback, and activates an electromagnetic clutch at the programmed release condition. Deliverables include a functional automated prototype, validated launch testing data, safety documentation, complete schematics, and a Bill of Materials. The broader impact demonstrates scalable automation principles applicable to animal enrichment systems and controlled material-launching applications.
Figure 1. Automated Zoo Catapult Feeder block diagram showing power and control architecture.
Kerwin Dortch, Engineering Technology; Franklin Hobbs, Engineering Technology; Cedric Bonds, Engineering Technology; Javier Favors, Engineering Technology
Team Safari Slingers
The Memphis Zoo Elephant Care Team currently relies on manual feeding methods that require physical effort and limit varied food placement within the enclosure. Predictable feeding patterns can reduce enrichment, and manual placement increase staff workload. This project aims to design and build an automated catapult system that safely and accurately launches food over controlled distances to improve feeding efficiency, enhance enrichment, and reduce physical strain on zookeepers.
The device consists of a wooden-frame catapult powered by four or six 12-volt direct current motors. An Arduino Mega microcontroller is used to coordinate motor operation through motor controllers, enabling controlled arm rotation, tensioning, and release. The structure and mechanical components are designed using CAD to ensure proper alignment, strength, and repeatable motion before fabrication. Wokwi and Tinkercad were used in designing and testing the circuit with software code. The design constraints include safety, structural stability, controlled launch angles, repeated mechanical loading, and suitability for outdoor use.
The methodology includes computer-aided modeling, mechanical construction, electrical integration of motors and control hardware, and embedded programming to automate the launch sequence. Repeated testing is conducted to refine angle control, tension consistency, and launch accuracy.
The deliverables include the capability of launching up to 150 ft along with various angles, a safety and user manual, and randomized automated feeding. This project demonstrates the integration of mechanical systems, motor control, and embedded electronics to address the Elephant Care Team’s issue.
Figure 1: 3D CAD design of the automated elephant feeding catapult mechanism
Stephanie Beloria, Engineering Technology, Joshua Springer, Engineering Technology, Corterreus Bedford, Engineering Technology, Brian Zhao, Engineering Technology, Ryan Gore, Engineering Technology
ABB
ABB, in conjunction with Precision Painters, sponsored two teams in the Herff Senior Design Expo. In conjunction with Precision Painters, ABB sponsored Team Stripes and Pipes. Matt Davis of ABB sponsored Team Precision Painters.
(Pictured: Team Pipes and Stripes with their poster presentation.)
Team Stripes and Pipes
The Pipes and Stripes/ABB Pipe Sprayer Project aims to address the current inefficiencies and inconsistencies present in the manual internal coating of industrial piping for ABB. The current process requires manual operation of the paint sprayer and pipe bed, resulting in uneven coating thickness and prolonged production times. To solve these issues, this project focuses on the development of an autonomous CNC gantry system designed to automate the spraying process for various pipe sizes and layouts.
The primary objective is to implement a synchronized motion system akin to a CNC system that utilizes an industrial arm equipped with a specialized paint nozzle and an advanced industrial machine vision solution for pipe detection. This system is engineered to maintain a constant distance from the internal pipe surface while a pressurized delivery system ensures a consistent flow rate of coating material. Key deliverables include functional CNC gantry, custom-coded PLC routines for path execution, and specialized End-of-Arm Tooling (EOAT) capable of accommodating varying pipe diameters. Additionally, a Human Machine Interface (HMI) allows operators to input specific pipe parameters using an industrial machine vision solution and initiate the spray cycle autonomously.
By integrating precision motion control with specialized hardware, the system aims to significantly increase production output and accuracy. The process focuses on replacing manual pipe painting with a reliable, automated routine that ensures a uniform, high-quality finish in line with ABB, and industry standards for corrosion resistance. The broader impact of this project is the achievement of a repeatable and efficient methodology for industrial applications, reducing manual labor while enhancing the production and reliability of coated piping systems. Ultimately, this solution provides a good framework for automating complex industrial painting tasks that currently rely on human operation.
Figure 1: Shows the CAD file of our main frame; systems will have motors on each axis, and the camera is mounted on top of the box.

Angelica Martinez, Engineering Technology, Albert Stanley, Engineering Technology, Brandon Rodriguez, Engineering Technology, Donovan Moore, Engineering Technology In
Team Precision Painters
Manual industrial painting processes have common issues such as inconsistent coatings, overspray, operator health and fatigue. This situation is challenging for large-scale manufacturing settings, which often lack affordable automation solutions or space that can provide the precision and repeatability necessary without the high cost and complexity associated with large robotic systems. As a result, there is a demand for a compact, reliable, and low-cost automated painting system that ensures consistent results, minimum wasted paint, and diminished manual operation.
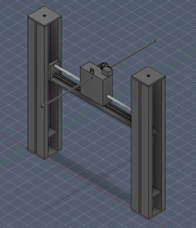
The proposed design centers on a mechanically driven painting arm that utilizes a lead screw-based linear actuation system to achieve precise and quick motion. This system is specifically engineered to avoid unintended rotational movement while ensuring smooth travel along the mechanism. To address potential operational challenges, structural components were meticulously selected and analyzed for stiffness under load, which is crucial for minimizing deflection that could adversely impact coating uniformity. Significant attention has been given to the overall movement mechanism to be easy to replicate and could paint faster.
The prototype showcases a simple replicate system, controlled by positioning the arm, making it well-suited for automated coating applications. By focusing on mechanical simplicity, structural integrity, and ease of manufacture, this project showcases a scalable idea for low-cost industrial painting automation.

Michael Bowen, Mechanical Engineering, Banu Seelam, Mechanical Engineering, Evan Klement, Mechanical Engineering, Albert Stanley, Engineering Technology, Donovan Moore, Engineering Technology, Angelica Martinez, Engineering Technology, Brandon Rodriguez, Engineering Technology
Dr. Yong Lee, Dr. Kevin Berisso
Dr. Joe Greer, Good Health Institute
Dr. Joe Greer of the Good Health Institute sponsored Team Five Guys' project on an AI Lesion Identification System.
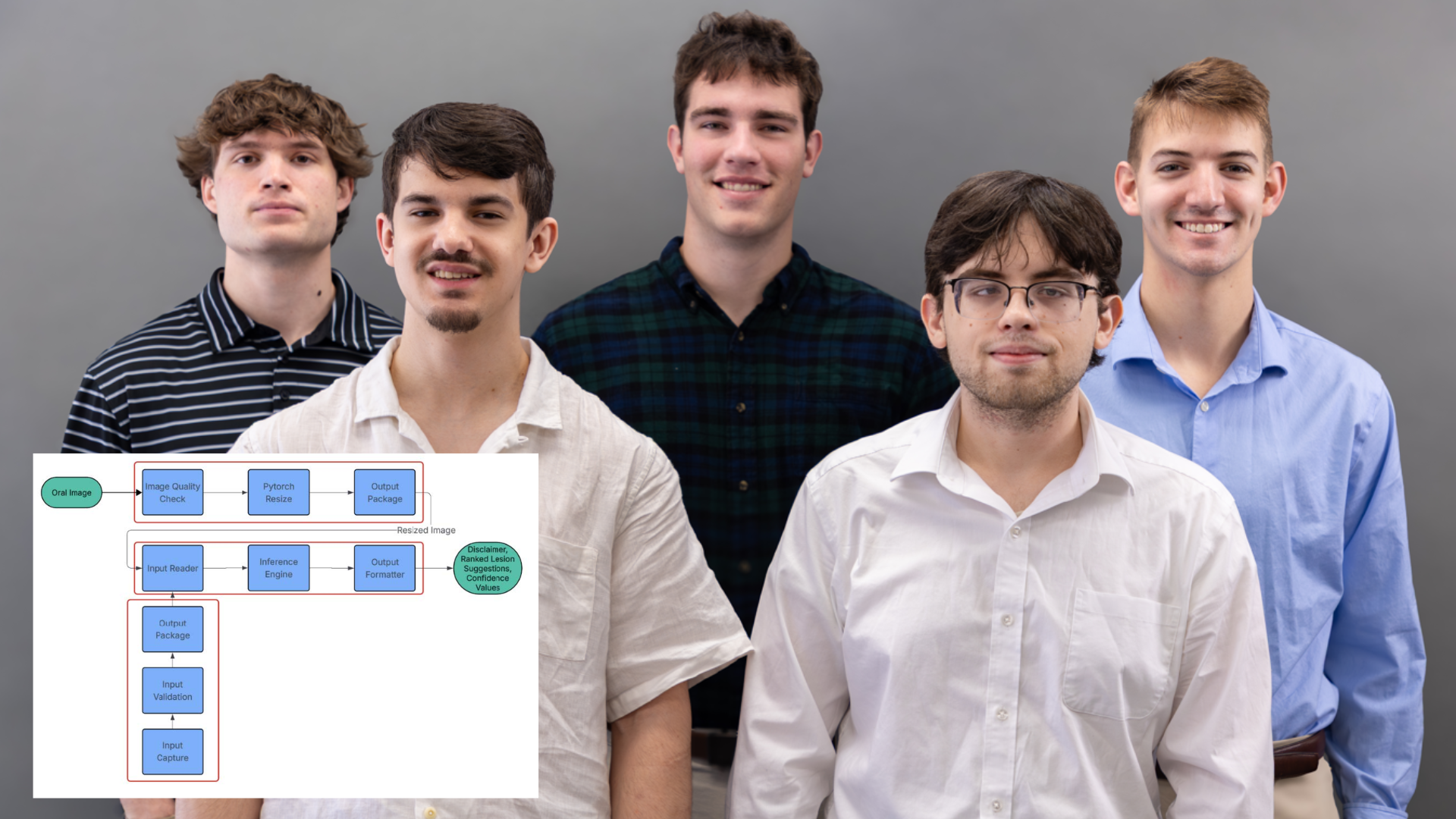
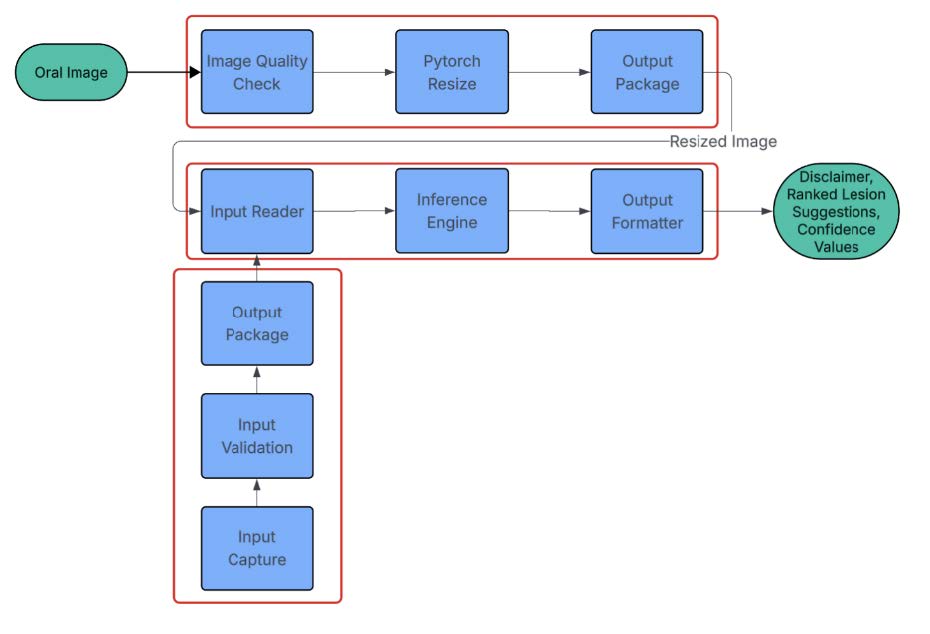
(Pictured: Team Five Guys and a diagram detailing their project.)
Team Five Guys
Medical and dental practitioners often encounter oral lesions that are difficult to identify during routine examinations. Some lesions are small or visually subtle, which increases the risk of delayed diagnosis and treatment. This project addresses the need for a rapid decision support tool that assists practitioners in identifying oral lesions from clinical images.
The objective is to develop an artificial intelligence-based lesion recognition system that analyzes an oral image and returns the three most likely lesion categories to support differential diagnosis. The system must achieve at least 85 percent classification accuracy and return results within two seconds to avoid interrupting clinical workflow. The design must also accept common dental image formats, provide confidence scores for predictions, and maintain patient privacy and data security.
The proposed approach uses a fine-tuned machine learning model trained on a curated dataset of oral lesion images. The model processes the image and optional descriptive parameters provided by the practitioner. A locally deployed system running on a workstation in the dental office performs the analysis. This architecture reduces network dependence, protects patient data, and enables fast inference.
The expected deliverable is a prototype lesion recognition application capable of assisting practitioners with preliminary lesion identification. This system aims to improve diagnostic efficiency and support earlier detection of potentially harmful oral conditions.
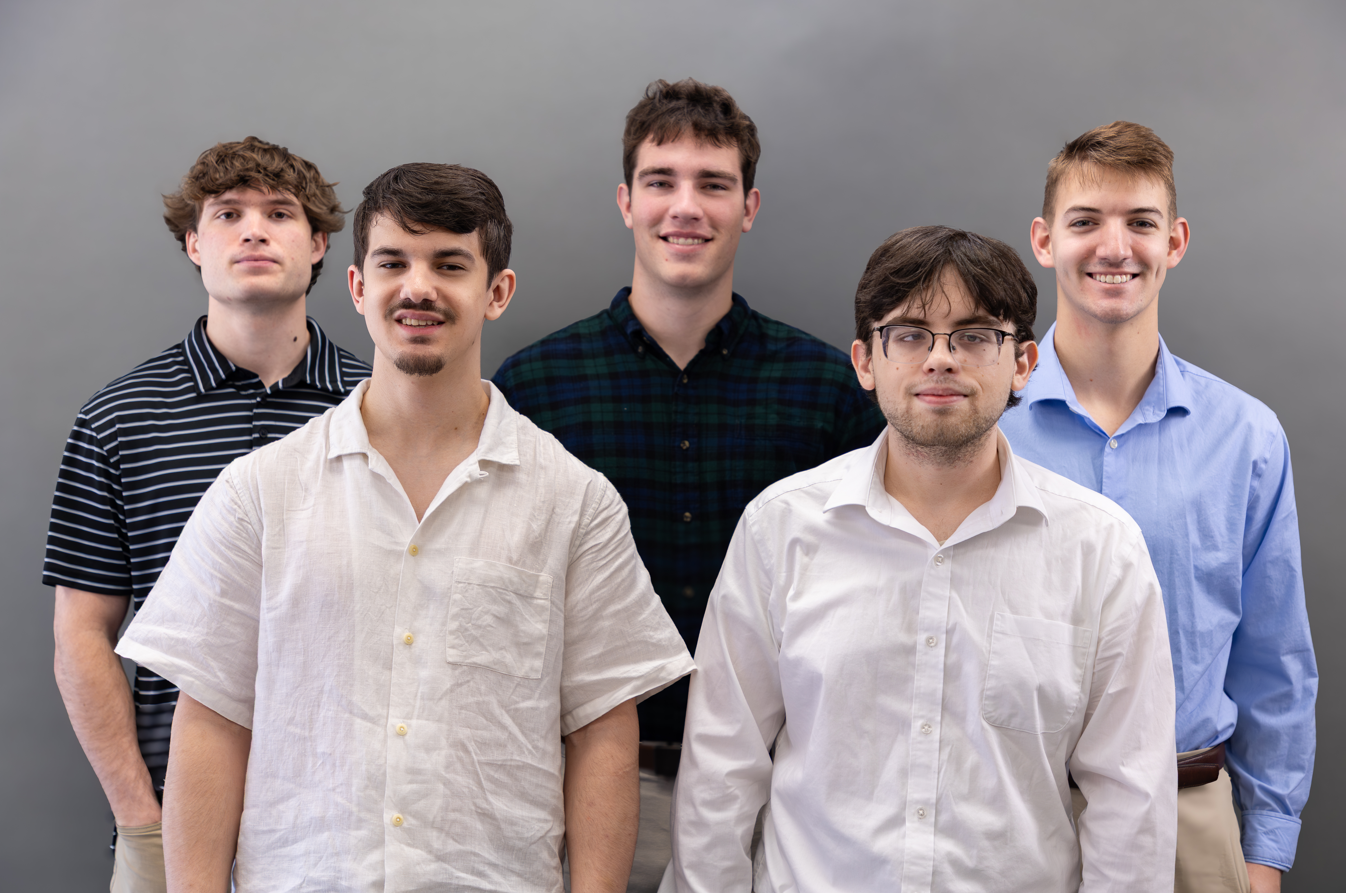
Benjamin Borwick, Computer Engineering, Brian Dunn, Electrical and Computer Engineering, Mason Hindman, Electrical Engineering, Patrick Brayden O’Briant, Electrical and Computer Engineering, Drake Watters, Electrical and Computer Engineering
American Institute of Aeronautics and Astronautics (AIAA)
The AIAA sponsored Team Flaps and Furious.
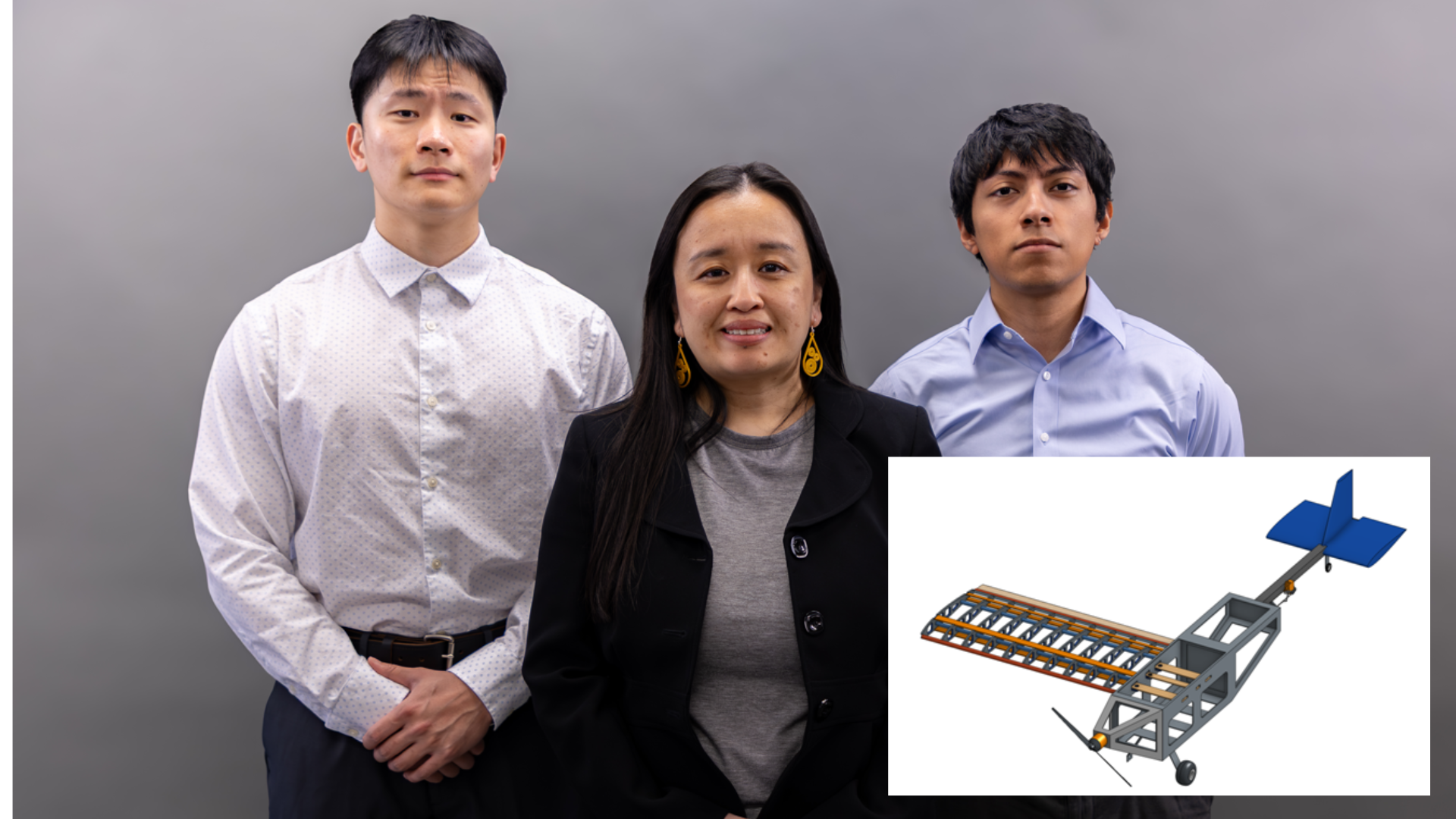
(Pictured: Team Flaps and the Furious and a depiction of their design.)
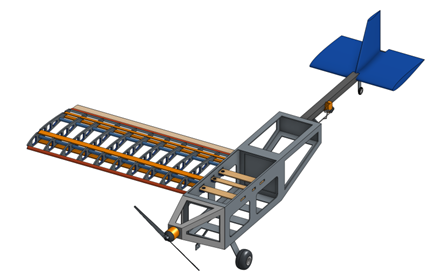
Team Flaps and Furious
The 2025-2026 Design, Build, Fly (DBF) competition objective is to design, build, and test an electric-powered, remote-controlled bush plane capable of performing charter missions and towing a deployable banner. The aircraft must complete three missions, each mission requiring the plane to fly three laps within five minutes: Mission I without payload, Mission II transporting at least three passengers and one cargo, and Mission III remotely deploying a banner. The passengers are standard size 2.3-inch rubber ducks, and each piece of cargo is a standard hockey puck. The constraints for the aircraft consist of a maximum wingspan of five feet and a fuselage containing at least one passenger compartment and one cargo compartment.
The final design selected optimizes mission performance and features a high wing, single tractor propulsion system, conventional tail, and a tail dragger landing gear. These choices were driven by the objectives of the DBF missions as well as practical considerations including cost, availability of components, efficiency, stability, and manufacturability. This design configuration formed a baseline for the team’s aircraft design for further iterations.
During the transition from the preliminary design to the detailed design, the team determined key challenges that drove design modifications. The first iteration involved a material selection change for the airfoil ribs. Material sourcing constraints and limited access to a CNC machine represented the first challenge the team encountered. The team transitioned from balsa wood to polylactic acid (PLA) based on structural, manufacturing, and consistency of tradeoffs. Following the change, the team focused on optimizing the ribs for the airfoil. In the final iteration, additional lightening holes and cuts were added to accommodate the spars including the leading spar edge. The design evolved from its preliminary configuration into a more structurally sound, manufacturable, and enhanced solution through team-selected iterations.
Figure 1: Airfoil Rib and Fuselage Attachment
MyHanh Lee, Mechanical Engineering: Bryan Mendoza, Mechanical Engineering; Xiaofeng Tan, Mechanical Engineering; Callie Brigance, Mechanical Engineering
Tiger BAJA, SAE BAJA competition
Tiger BAJA sponsored Team Frame Job in their project Tiger BAJA Frame and Cockpit Intergration.

(Team Frame Job presents their design)
Team Frame Job
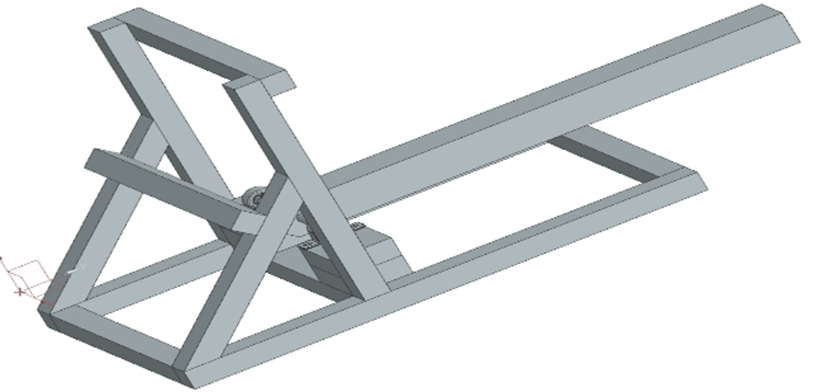
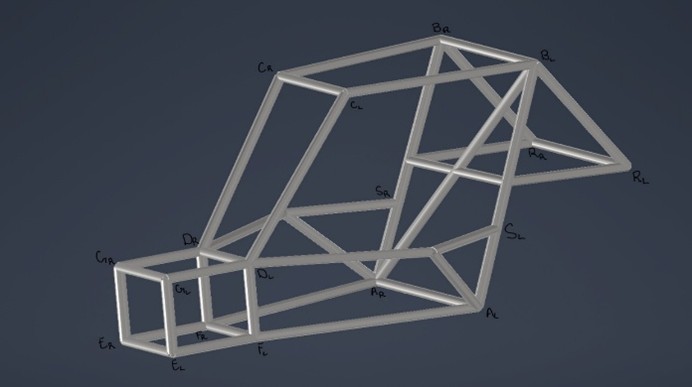
The Tiger Baja 2026 Primary Frame and Cockpit Integration project focuses on rebuilding a competitive and technically compliant Baja SAE vehicle platform for the University of Memphis. After a period of limited team continuity, the primary goal is to design and fabricate a race-ready frame that meets all Baja SAE safety and technical inspection requirements while allowing successful integration of suspension, steering, powertrain, and safety systems. The project must be completed within a $2,500 budget by a four-member team, making cost control, manufacturability, and practical decision-making central to the design process.
The frame is constructed from ASTM A513 Type 5 1020 DOM steel tubing (1.5-inch outer diameter with 0.095-inch wall thickness). While the original intent was to optimize stiffness-to-weight ratio, material selection was ultimately guided by sponsor availability and timeline constraints. As a result, the team prioritized developing a structurally sound and manufacturable design that could reliably compete rather than pursuing full structural optimization. The entire frame was modeled in Autodesk Inventor based directly on Baja SAE rule requirements for tube sizing, safety zones, and required clearances. Although outsourcing fabrication was possible, the team chose to manufacture the frame completely in-house using metal inert gas welding to gain hands-on experience, maintain control over quality, and increase competition scoring potential. Validation efforts focus on dimensional compliance, yield-strength-based calculations, and complete inspection documentation.
The final deliverable is a fully integrated, competition-ready primary frame that restores operational momentum to the Tiger Baja program. In addition to competition performance, the project provides valuable student exposure to automotive design, fabrication practices, sponsor collaboration, and national engineering competition, helping strengthen both technical skills and professional development.
Figure: 2026 Tiger Baja Primary Frame and Cockpit Structure.
Christopher Cicalla, Mechanical Engineering, David Eberle, Mechanical Engineering, Jayce Fiene, Mechanical Engineering, Tyler Miller, Mechanical Engineering
STEPHAN DOORLEY, RAPAC
Stephan Doorley with RAPAC sponsored Team Frostbite Fabricators in their project Strand Tank Cooling System
(Pictured: Team Frostbite Fabricators and a diagram of their design.)
Team Frostbite Fabricators
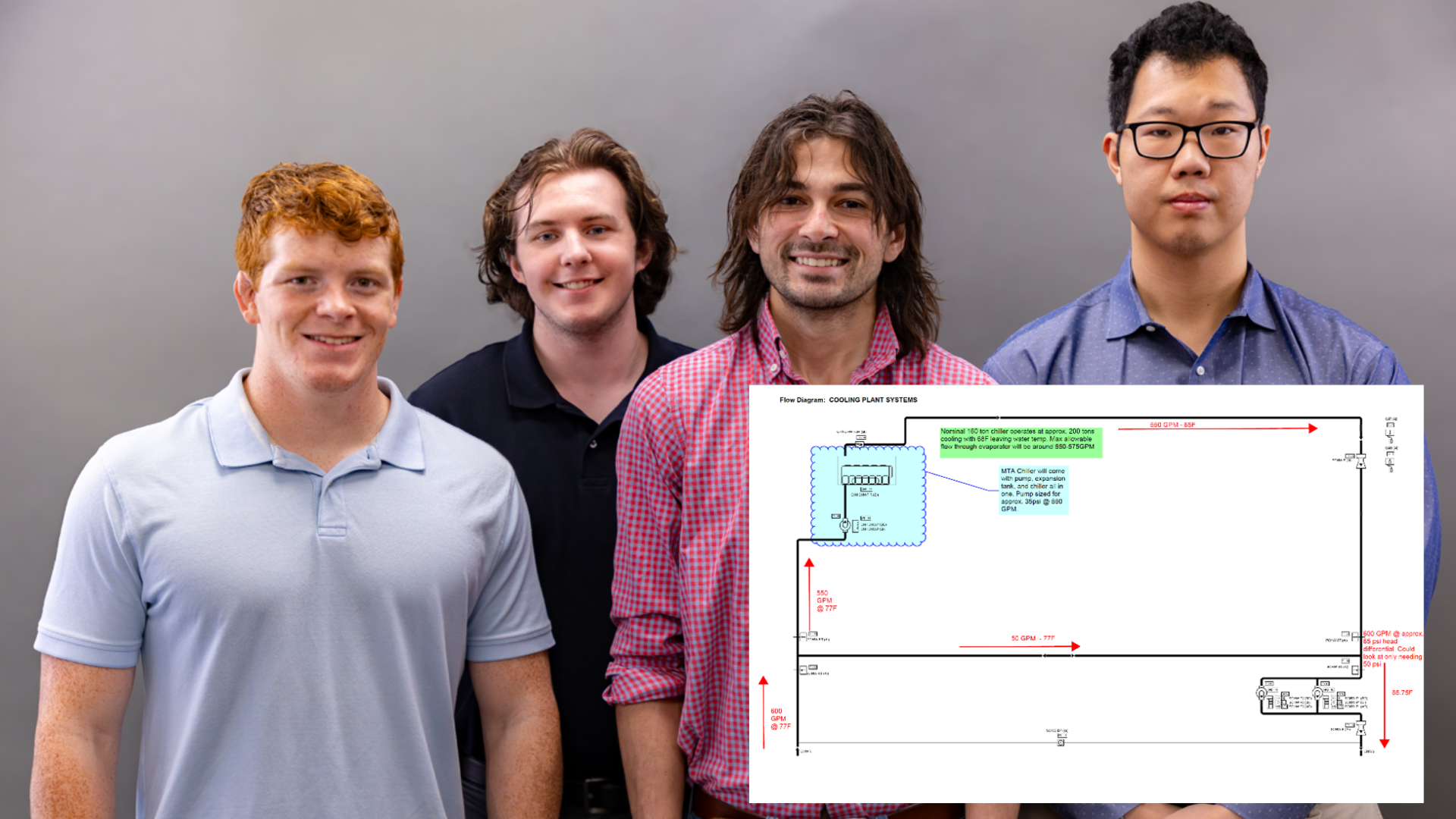
RAPAC, the largest polystyrene recycling company in the United States, operates an industrial production line composed of shredders, compactors, densifiers, extruders, and pelletizers that generate substantial thermal energy during continuous operation. Effective cooling is required to maintain safe operating temperatures, protect equipment, and sustain production efficiency. RAPAC currently relies on empirically selected chiller setpoints, which may result in excessive energy consumption and higher operational costs. This project aims to replace empirical operation with an analytical, data-driven approach to optimize coolant temperatures and overall chiller performance. The engineering objective is to model heat transfer across the production line and determine the true thermal load of each major component. The team will develop a comprehensive map of the chilled and cooling water distribution network and document the heat transfer mechanisms associated with each machine. Required water temperatures, volumetric flow rates, and resulting cooling tonnage will be calculated using measured system data and fundamental thermodynamic principles. Central to the analysis is the heat transfer relationship , which connects mass flow rate, specific heat capacity, and temperature change to quantify heat rejection. A custom software tool will be developed to automate this analysis and translate field measurements into actionable engineering outputs. The application will estimate equipment heat loads, predict total chiller demand, and recommend optimized coolant operating conditions. This tool provides RAPAC with a repeatable framework for evaluating system performance under varying production scenarios. By enabling analytical control of cooling parameters, the project supports energy conservation, reduces operating expenses, and enhances long-term system reliability. The resulting methodology establishes a scalable foundation for future process optimization and demonstrates how thermal modeling and software integration can improve industrial energy management in recycling operations.
Figure 1: Cooling plant layout supporting RAPAC process optimization, detailing chiller capacity, flow rates, and thermal balance for improved chilled water efficiency and production reliability.
Denny Jun, Mechanical Engineering, Stephen Johnston, Mechanical Engineering, Luke Krepela, Mechanical Engineering, Tyler Owens, Mechanical Engineering
Jackie Carter, PEMKO/ASSA ABLOY
Jackie Carter with PEMKO/ASSA ABLOY sponsored Team High Clearance Doormen in their project Design & Build Multi-Door Sliding Testing Apparatus.
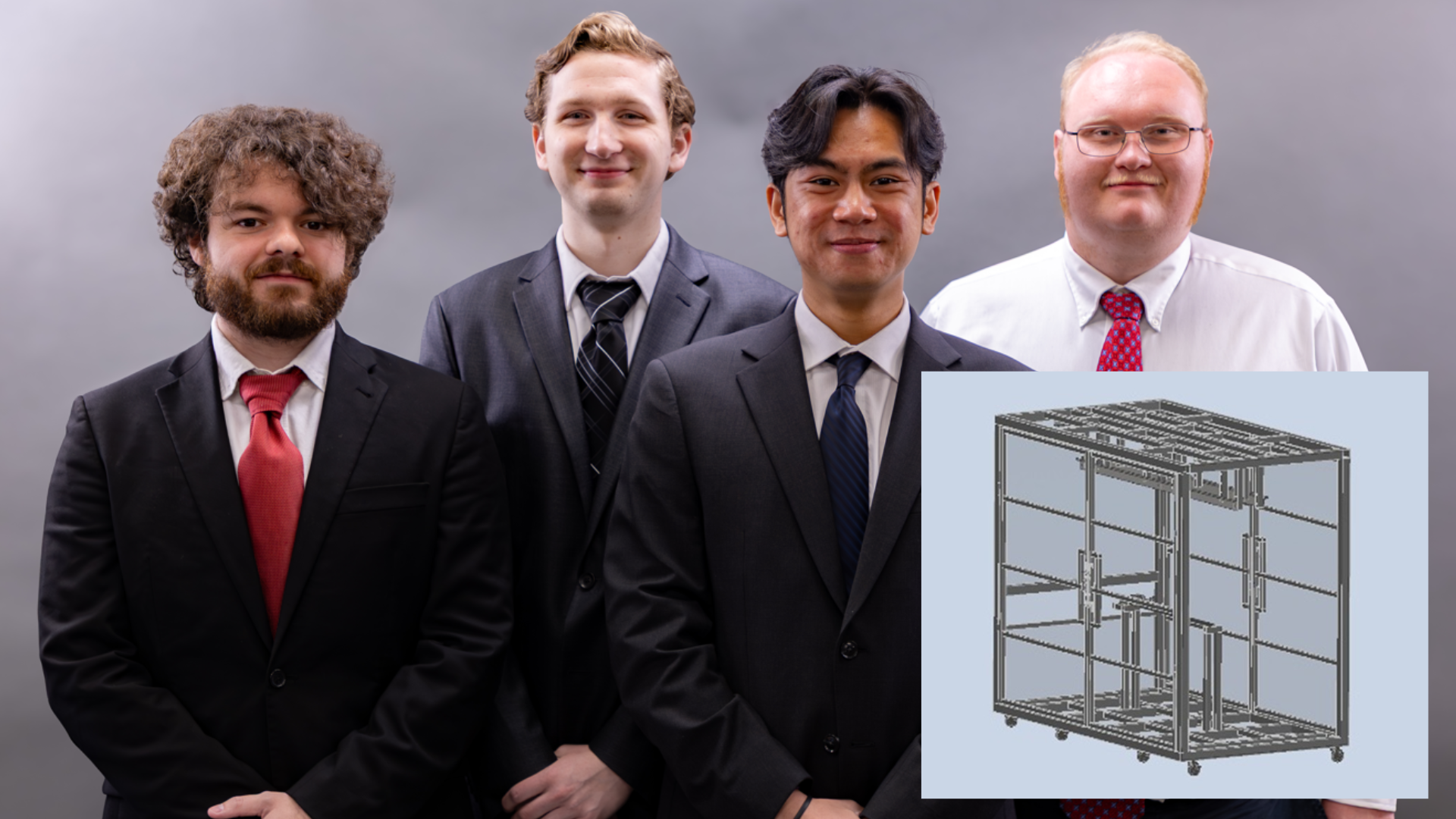
(Pictured: Team High Clearance Doormen and a graphic of their design.)
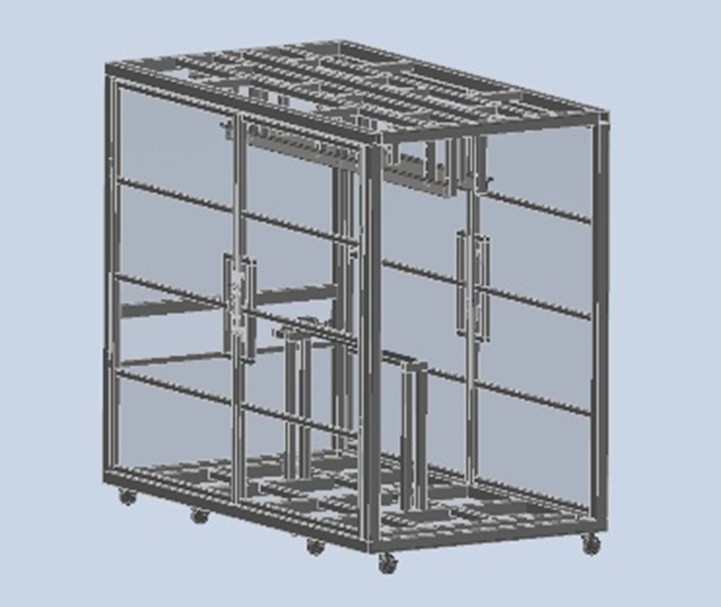
Team High Clearance Doormen
PEMKO/ASSA ABLOY is a sliding and folding door hardware company based in Memphis, TN. Their products are extensively tested to ensure quality and safety before they reach consumers. PEMKO inspects their sliding doors with various tests that simulate real-world applications. These tests must adhere to the standards set by the American National Standards Institute (ANSI) and the Builders Hardware Manufacturers Association (BHMA). Currently, the client’s testing process is limited to one sliding door at a time, which is a significant hinderance, considering that these tests can take several days to complete.
To address this challenge, PEMKO has tasked the senior design team with developing a sliding hardware testing apparatus capable of testing two doors simultaneously. The new proposed system must uphold the same rigorous testing standards while enabling smooth transitions between various sliding hardware styles in PEMKO’s product line. The system is required to be enclosed in a robust safety cage equipped with sensors, electronic stops, and other safety features. The design will be optimized to occupy minimal facility space, reducing its footprint without compromising functionality and performance. The testing process will require little employee involvement once the sliding doors are mounted and the safety cage is closed. The senior design team proposes that the system is propelled by a power screw mechanism, which offers improved performance, reduced maintenance, and finer position accuracy compared to the previously used chain-driven system. The assembly will significantly improve testing efficiency and minimize maintenance needs, providing PEMKO with a durable, long-term solution that streamlines their operations.
Figure 1: CAD model of apparatus, as of February 2026
Dylan Dinh, Mechanical Engineering, Caleb Edwards, Mechanical Engineering, Joseph Perry, Mechanical Engineering, Cody Chamberlain, Mechanical Engineering
National Guard Products
National Guard Products sponsored Team School Guardians in their design of a privacy screen kit.

(Pictured: Team School Guardians and a graphic of their design.)
Team School Guardians
National Guard Products (NGP) has a Security Sliding Door product, which covers door windows, and has explored bulletproof security sliding door concepts. However, market research has indicated demand for screens that prioritize privacy over bulletproof protection and have aesthetic appeal. The main objective is to develop a cost-competitive privacy screen that is easy to install and does not compromise the certified fire-resistance rating of the door to which the product is applied. The design solution repurposes existing NGP components and products and supports mass production and widescale commercial implementation, particularly in school buildings. School lockdowns in America require line-of-sight blocking for classrooms. However, schools still rely on rudimentary alternatives, often slow and flimsy, to cover windows. The designed product is a fast, reliable solution to this problem.
The final design consists of an accordion panel system mounted in frames that deploys to cover the window. When folded, the aluminum panels stack at the top of the frame to allow a view through the window. The screen has quick deployment, allowing the panels to unfold and block the window’s line of sight. The assembly consists of a back, middle, and front metal frame, as well as aluminum panels and a simple latching mechanism. The panels are glued to a flexible fabric that acts as a hinge between panels. The front panel is welded to the middle frame, and the back frame is attached with screws to allow easy access to the screen for maintenance. The whole assembly is attached to the door’s window frame with the use of magnets, which are secured to the frame using an adhesive. In case of a fire, the product is designed so the magnets will fail, and the assembly will fall from the door, preventing the product from interfering with the fire-resistance of the door.
Figure 1: Privacy Screen Kit Prototype CAD Model


Juan Guerrero, Mechanical Engineering, Tanya Prahalathan, Mechanical Engineering, Flavie Dubé, Mechanical Engineering, Derian Williams, Mechanical Engineering
Dr. Alexander Headley, Mechanical Engineering
Rad Hunsley, Rough Country
Rad Hunsley of Rough Country sponsored Team Suspension is Killing Me in their design of a Tiger BAJA Suspension and Steering System.

(Team The Suspension is Killing Me presents their design)
Team Suspension is Killing Me
The University of Memphis Tiger BAJA team is working to design and build a competitive off-road vehicle for participation in the SAE BAJA competition, marking the program’s return to competition for the first time since 2019. A key component of this effort is the design of the vehicle’s front suspension and steering systems, which play a critical role in vehicle control, durability, and driver safety during off-road events. This senior design project focuses on creating a reliable, manufacturable front-end system that can withstand rough terrain while providing predictable and responsive handling.
The project involves the custom design of the upper and lower control arms and the steering knuckle. These components were designed to balance strength, weight, and ease of manufacturing while meeting SAE BAJA competition requirements. To complete the steering system, commercially available components were selected based on durability, compatibility, and safety considerations.
The overall system was developed using computer-aided design tools to ensure proper integration with the rest of the vehicle. Design decisions were guided by the need for strength, serviceability, and straightforward assembly, allowing the vehicle to be maintained during competition. While advanced engineering analysis was used during the design process, the final design emphasizes real-world functionality and reliability.
Beyond its technical objectives, this project represents a major step toward reestablishing Tiger BAJA as an active and competitive team at the University of Memphis. By delivering functional and competition-ready front suspension and steering systems, this project helps lay the foundation for future teams. The completed system will be integrated into the vehicle with the goal of returning the team to SAE BAJA competition and generating renewed excitement around hands-on engineering at the university!
Caleb May (Mechanical Engineering), Isabella Selvera (Mechanical Engineering), Olivia Ganavazos (Mechanical Engineering), David Maybee (Mechanical Engineering)